publications
2026
-
 Functional gradients facilitate tactile sensing in elephant whiskersAndrew K. Schulz, Lena V. Kaufmann, Lawrence T. Smith, and 6 more authorsScience, 2026
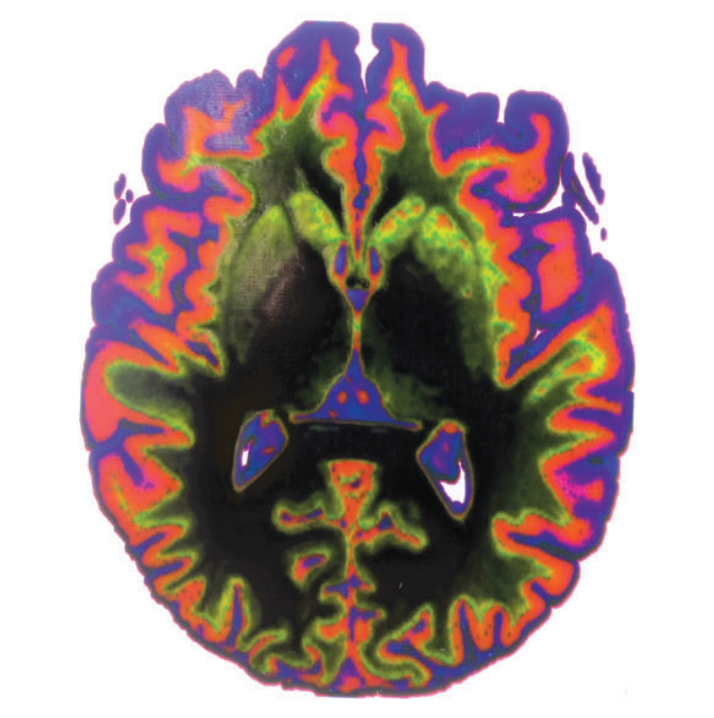
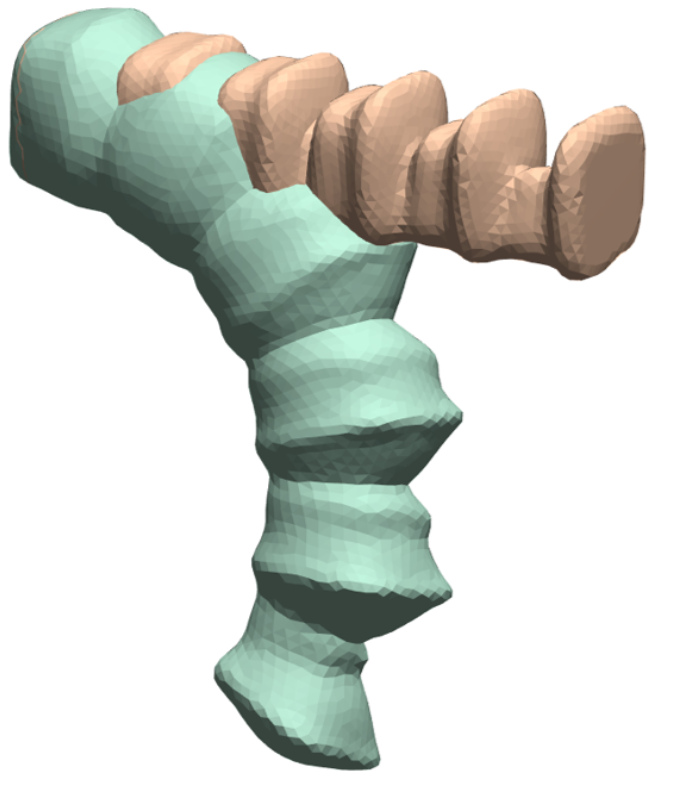
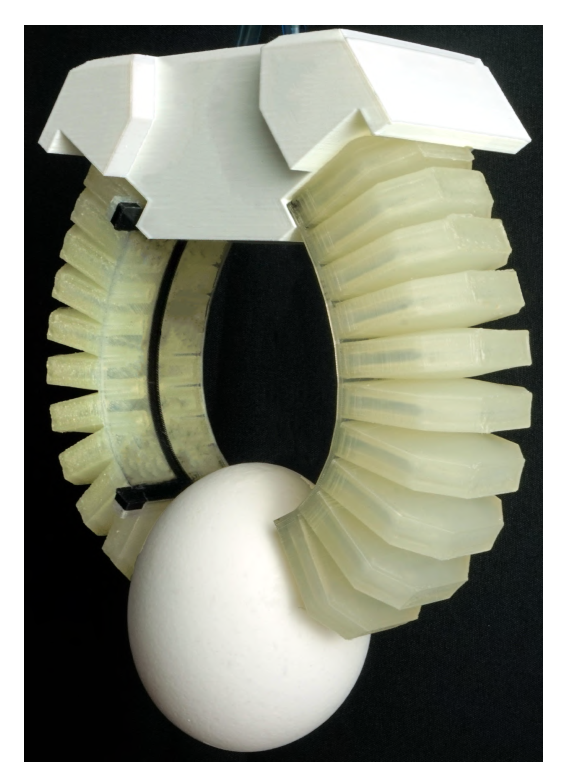
Functional gradients facilitate tactile sensing in elephant whiskersAndrew K. Schulz, Lena V. Kaufmann, Lawrence T. Smith, and 6 more authorsScience, 2026Keratin composites enable animals to hike with hooves, fly with feathers, and sense with skin. Mammalian whiskers are elongated keratin rods attached to tactile skin structures that extend the animal’s sensory volume. We investigated the whiskers that cover Asian elephant (Elephas maximus) trunks and found that they are geometrically and mechanically tailored to facilitate tactile perception by encoding contact location in the amplitude and frequency of the vibrotactile signal felt at the whisker base. Elephant whiskers emerge from armored trunk skin and shift from a thick, circular, porous, stiff base to a thin, ovular, dense, soft tip. These functional gradients of geometry, porosity, and stiffness independently tune the neuromechanics of elephant trunk touch to facilitate highly dexterous manipulation while ensuring whisker durability. Mammals such as cats and rats use whiskers to help sense their environment. In rats, the short whiskers and long whiskers resonate at different frequencies, helping rats map out their surroundings as the keratin-based fibers contact the edges and surfaces of nearby objects. Elephants also have whiskers, which line the length of their trunks. Schulz et al. used micro–computed tomography imaging, electron microscopy, mechanical testing, and finite element analysis to map out the structure and properties of these whiskers. At the base of the trunk, the whiskers are thick, circular, porous, and stiff, but they progress toward being thin, ovular, dense, and soft toward the tip, which contrasts with whiskers found in most other mammals. This combination of structure and form helps magnify the signals transmitted to the trunk. —Marc S. Lavine
2024
-
 Cuboidal Deformation of Multimaterial Composites Prepared by 3-D Printing of Liquid Crystalline ElastomersJoselle M. McCracken, Grant E. Bauman, Graham Williams, and 4 more authorsACS Applied Materials & Interfaces, 2024
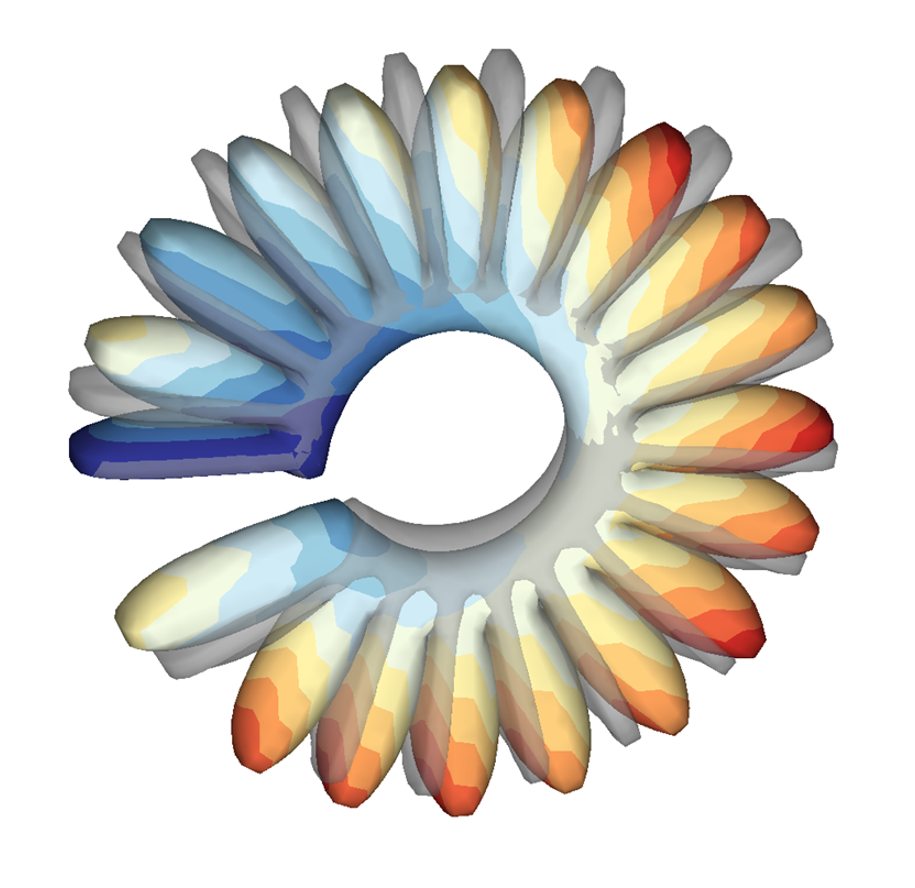
Cuboidal Deformation of Multimaterial Composites Prepared by 3-D Printing of Liquid Crystalline ElastomersJoselle M. McCracken, Grant E. Bauman, Graham Williams, and 4 more authorsACS Applied Materials & Interfaces, 2024Multimaterial 3-D printing (3DP) of isotropic (IsoE) and liquid crystalline elastomers (LCE) yields spatially programmed elements that undergo a cuboidal shape transformation upon heating. The thermomechanical deformation of 3DP elements is determined by the geometry and extent of the isotropic and anisotropic regions. The synthesis and experimental characterization of the 3DP elements are complemented by finite element analysis (FEA). Calculations emphasize that the cuboidal deformation of the myriad 3DP elements is a manifestation of local stress gradients imparted by local control of the material composition and anisotropy. Varying the rectilinear spatial distribution of the multimaterial elastomer composites produces complex, multistable states that provide insights into how stress gradients drive multimaterial elastomer actuation. The thermomechanical stimuli response of the multimaterial elements is explored as a tactile element.
@article{doi:10.1021/acsami.4c14792, author = {McCracken, Joselle M. and Bauman, Grant E. and Williams, Graham and Santos, Misael and Smith, Lawrence and MacCurdy, Robert and White, Timothy J.}, title = {Cuboidal Deformation of Multimaterial Composites Prepared by 3-D Printing of Liquid Crystalline Elastomers}, journal = {ACS Applied Materials \& Interfaces}, volume = {16}, number = {50}, pages = {69851-69857}, year = {2024}, doi = {10.1021/acsami.4c14792}, } -
 Femtosecond Laser Fabricated Nitinol Living Hinges for Millimeter-Sized RobotsAlexander Hedrick, Heiko Kabutz, Lawrence Smith, and 2 more authorsIEEE Robotics and Automation Letters, 2024
Femtosecond Laser Fabricated Nitinol Living Hinges for Millimeter-Sized RobotsAlexander Hedrick, Heiko Kabutz, Lawrence Smith, and 2 more authorsIEEE Robotics and Automation Letters, 2024Nitinol is a smart material that can be used as an actuator, a sensor, or a structural element, and has the potential to significantly enhance the capabilities of microrobots. Femtosecond laser technology can be used to process nitinol while avoiding heat-affected zones (HAZ), thus retaining superelastic properties. In this work, we manufacture living hinges of arbitrary cross sections from nitinol using a femtosecond laser micromachining process. We first determined the laser cutting parameters, 4.1Jcm−2 fluence with 5 passes for 5μm ablation, by varying laser power level and number of passes. Next, we modeled the hinges using an analytical model as well as creating an Abaqus finite element method, and showed the accuracy of the models by comparing them to the torque produced by eight different hinges, four with a rectangular cross section and four with an elliptic notch cross section. Finally, we manufactured a prototype miniature device to illustrate the usefulness of these nitinol hinges: a piezoelectric actuated robotic wing mechanism, and we characterized its performance.
@article{10506570, author = {Hedrick, Alexander and Kabutz, Heiko and Smith, Lawrence and MacCurdy, Robert and Jayaram, Kaushik}, journal = {IEEE Robotics and Automation Letters}, title = {Femtosecond Laser Fabricated Nitinol Living Hinges for Millimeter-Sized Robots}, year = {2024}, volume = {9}, number = {6}, pages = {5449-5455}, keywords = {Fasteners;Laser beam cutting;Ultrafast optics;Laser ablation;Surface treatment;Measurement by laser beam;Manufacturing processes;Bio-inspired robotics;Compliant joints and mechanisms;engineering for robotic systems;biologically-inspired robots}, doi = {10.1109/LRA.2024.3392490}, } -
 Digital Multiphase Composites via Additive ManufacturingLawrence T. Smith and Robert B. MacCurdyAdvanced Materials, 2024
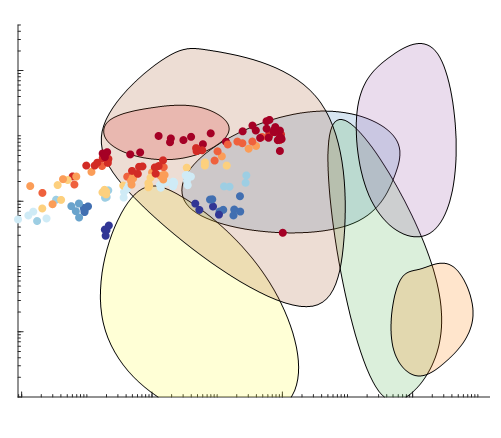
Digital Multiphase Composites via Additive ManufacturingLawrence T. Smith and Robert B. MacCurdyAdvanced Materials, 2024Mechanical properties of traditional engineering materials are typically coupled to each other, presenting a challenge to practitioners with multi-dimensional material property requirements. In this work, continuous, independent control over multiple mechanical properties is demonstrated in composite materials realized using additive manufacturing. For the first time, composites additively manufactured from rigid plastic, soft elastomer, and liquid constituents are experimentally characterized, demonstrating materials which span four orders of magnitude in modulus and two orders of magnitude in toughness. By forming analytical mappings between relative concentrations of constituents at the microscale and resulting macroscale material properties, inverse material design is enabled; the method is showcased by printing artifacts with prescribed toughness and elasticity distributions. The properties of these composites are placed in the context of biological tissues, showing they have promise as mechanically plausible tissue mimics.
@article{Smith2024DigitalManufacturing, title = {{Digital Multiphase Composites via Additive Manufacturing}}, year = {2024}, journal = {Advanced Materials}, author = {Smith, Lawrence T. and MacCurdy, Robert B.}, pages = {1--9}, volume = {2308491}, doi = {10.1002/adma.202308491}, issn = {15214095}, keywords = {additive manufacturing, digital composites, material characterization, multiphase materials}, osf = {https://github.com/MacCurdyLab/DigitalMultiphaseMaterials}, } -
 Tunable Metamaterials for Impact MitigationLawrence Smith, Brandon Hayes, Kurtis Ford, and 3 more authorsAdvanced Materials Technologies, 2024
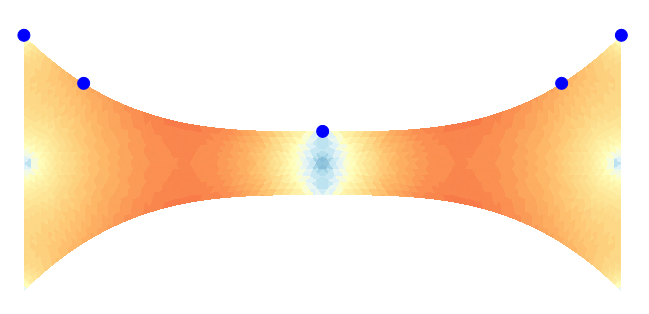
Tunable Metamaterials for Impact MitigationLawrence Smith, Brandon Hayes, Kurtis Ford, and 3 more authorsAdvanced Materials Technologies, 2024Traditional methods of shielding fragile goods and human tissues from impact energy rely on isotropic foam materials. The mechanical properties of these foams are inferior to an emerging class of metamaterials called plate lattices, which have predominantly been fabricated in simple 2.5-dimensional geometries using conventional methods that constrain the feasible design space. In this work, additive manufacturing is used to relax these constraints and realize plate lattice metamaterials with nontrivial, locally varying geometry. The limitations of traditional computer-aided design tools are circumvented and allow the simulation of complex buckling and collapse behaviors without a manual meshing step. By validating these simulations against experimental data from tests on fabricated samples, sweeping exploration of the plate lattice design space is enabled. Numerical and experimental tests demonstrate plate lattices absorb up to six times more impact energy at equivalent densities relative to foams and shield objects from impacts ten times more energetic while transmitting equivalent peak stresses. In contrast to previous investigations of plate lattice metamaterials, designs with nonuniform geometric prebuckling in the out-of-plane direction is explored and showed that these designs exhibit 10% higher energy absorption efficiency on average and 25% higher in the highest-performing design.
@article{Smith2024TunableMitigation, title = {{Tunable Metamaterials for Impact Mitigation}}, year = {2024}, journal = {Advanced Materials Technologies}, author = {Smith, Lawrence and Hayes, Brandon and Ford, Kurtis and Smith, Elizabeth and Flores, David and MacCurdy, Robert}, number = {6}, pages = {1--11}, volume = {9}, doi = {10.1002/admt.202301668}, issn = {2365709X}, keywords = {additive manufacturing, computational design, impact mitigation, metamaterials}, }
2023
-
 SoRoForge: End-to-End Soft Actuator DesignLawrence Smith and Robert MacCurdyIEEE Transactions on Automation Science and Engineering, 2023
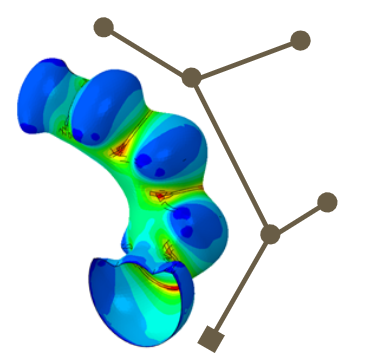
SoRoForge: End-to-End Soft Actuator DesignLawrence Smith and Robert MacCurdyIEEE Transactions on Automation Science and Engineering, 2023We present SoRoForge, a design tool which addresses several limitations in the existing design and fabrication workflow for pneumatic soft actuators. We use implicit geometry functions to specify geometry and material distribution, a GUIbased software tool for interactive exploration of computational network representations of these implicit functions, and an automated tool for generating and displaying rapid simulation results of candidate designs. We prioritize seamless connectivity between all stages of the design and fabrication process, and elimination of steps that require human intervention. The workflow presented here integrates with existing capabilities for multimaterial additive manufacturing, and is also forwardcompatible with emerging automated design techniques. The data gathered from human-interaction with this tool will be used by future automation tools to enable fully-automated soft actuator design based on high-level specifications.
@article{Smith2023SoRoForge:Design, title = {{SoRoForge: End-to-End Soft Actuator Design}}, year = {2023}, journal = {IEEE Transactions on Automation Science and Engineering}, author = {Smith, Lawrence and MacCurdy, Robert}, pages = {1--12}, publisher = {IEEE}, doi = {10.1109/TASE.2023.3241866}, issn = {15583783}, keywords = {Soft actuators, automation, design}, }
2022
-
 Voxel Printing Anatomy: Design and Fabrication of Realistic, Presurgical Planning Models through Bitmap PrintingNicholas M. Jacobson, Lawrence Smith, Jane Brusilovsky, and 3 more authorsJournal of Visualized Experiments, 2022
Voxel Printing Anatomy: Design and Fabrication of Realistic, Presurgical Planning Models through Bitmap PrintingNicholas M. Jacobson, Lawrence Smith, Jane Brusilovsky, and 3 more authorsJournal of Visualized Experiments, 2022Most applications of 3-dimensional (3D) printing for presurgical planning have been limited to bony structures and simple morphological descriptions of complex organs due to the fundamental limitations in accuracy, quality, and efficiency of the current modeling paradigm. This has largely ignored the soft tissue critical to most surgical specialties where the interior of an object matters and anatomical boundaries transition gradually. Therefore, the needs of the biomedical industry to replicate human tissue, which displays multiple scales of organization and varying material distributions, necessitate new forms of representation. Presented here is a novel technique to create 3D models directly from medical images, which are superior in spatial and contrast resolution to current 3D modeling methods and contain previously unachievable spatial fidelity and soft tissue differentiation. Also presented are empirical measurements of novel, additively manufactured composites that span the gamut of material stiffnesses seen in soft biological tissues from MRI and CT. These unique volumetric design and printing methods allow for deterministic and continuous adjustment of material stiffness and color. This capability enables an entirely new application of additive manufacturing to presurgical planning: mechanical realism. As a natural complement to existing models that provide appearance matching, these new models also allow medical professionals to "feel" the spatially varying material properties of a tissue simulant-a critical addition to a field in which tactile sensation plays a key role.
@article{Jacobson2022, title = {{Voxel Printing Anatomy: Design and Fabrication of Realistic, Presurgical Planning Models through Bitmap Printing}}, year = {2022}, journal = {Journal of Visualized Experiments}, author = {Jacobson, Nicholas M. and Smith, Lawrence and Brusilovsky, Jane and Carrera, Erik and McClain, Hayden and Maccurdy, Robert}, number = {February}, pages = {1--15}, volume = {180}, doi = {10.3791/63214}, issn = {1940087X}, pmid = {35225265}, } -
 Automated Synthesis of Bending Pneumatic Soft ActuatorsLawrence Smith, Travis Hainsworth, Jacob Haimes, and 1 more author2022 IEEE 5th International Conference on Soft Robotics, RoboSoft 2022, 2022
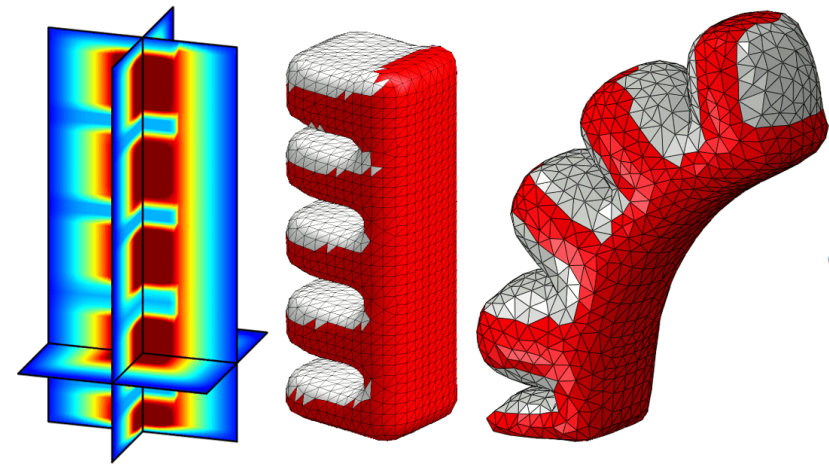
Automated Synthesis of Bending Pneumatic Soft ActuatorsLawrence Smith, Travis Hainsworth, Jacob Haimes, and 1 more author2022 IEEE 5th International Conference on Soft Robotics, RoboSoft 2022, 2022Soft robotics embraces the design philosophy of function through morphology. Therefore defining the affordances of a soft robotic structure is equivalent to determining the composition and distribution of the materials that make up the robot. This design process has historically been dominated by human intuition and labor-intensive experimentation. However, the design space of multi-material continuum structures is infinite. Automation tools to accelerate soft robot design could enable new designs to be created on-demand, specific to a need, more rapidly and at lower cost than would be possible using human labor alone. In this work we formulate the soft robot design problem as a multi-objective optimization task. We demonstrate a design automation system for bending soft actuators which integrates multi-objective heuristic search with a powerful generative encoding that converts high level design goals, compliance and forcefulness in our case, into mechanical designs automatically. These designs can be directly fabricated using a 3-D printer. We compare numerous simulated results from our optimization and a physical instance fabricated via 3-D printing with a broad survey of contemporary results from the soft robotics literature.
@article{Smith2022AutomatedActuators, title = {{Automated Synthesis of Bending Pneumatic Soft Actuators}}, year = {2022}, journal = {2022 IEEE 5th International Conference on Soft Robotics, RoboSoft 2022}, author = {Smith, Lawrence and Hainsworth, Travis and Haimes, Jacob and MacCurdy, Robert}, pages = {358--363}, publisher = {IEEE}, isbn = {9781665408288}, doi = {10.1109/RoboSoft54090.2022.9762105}, } -
 Stretching the Boundary: Shell Finite Elements for Pneumatic Soft ActuatorsLawrence Smith, Jacob Haimes, and Robert MacCurdy2022 IEEE 5th International Conference on Soft Robotics, RoboSoft 2022, 2022
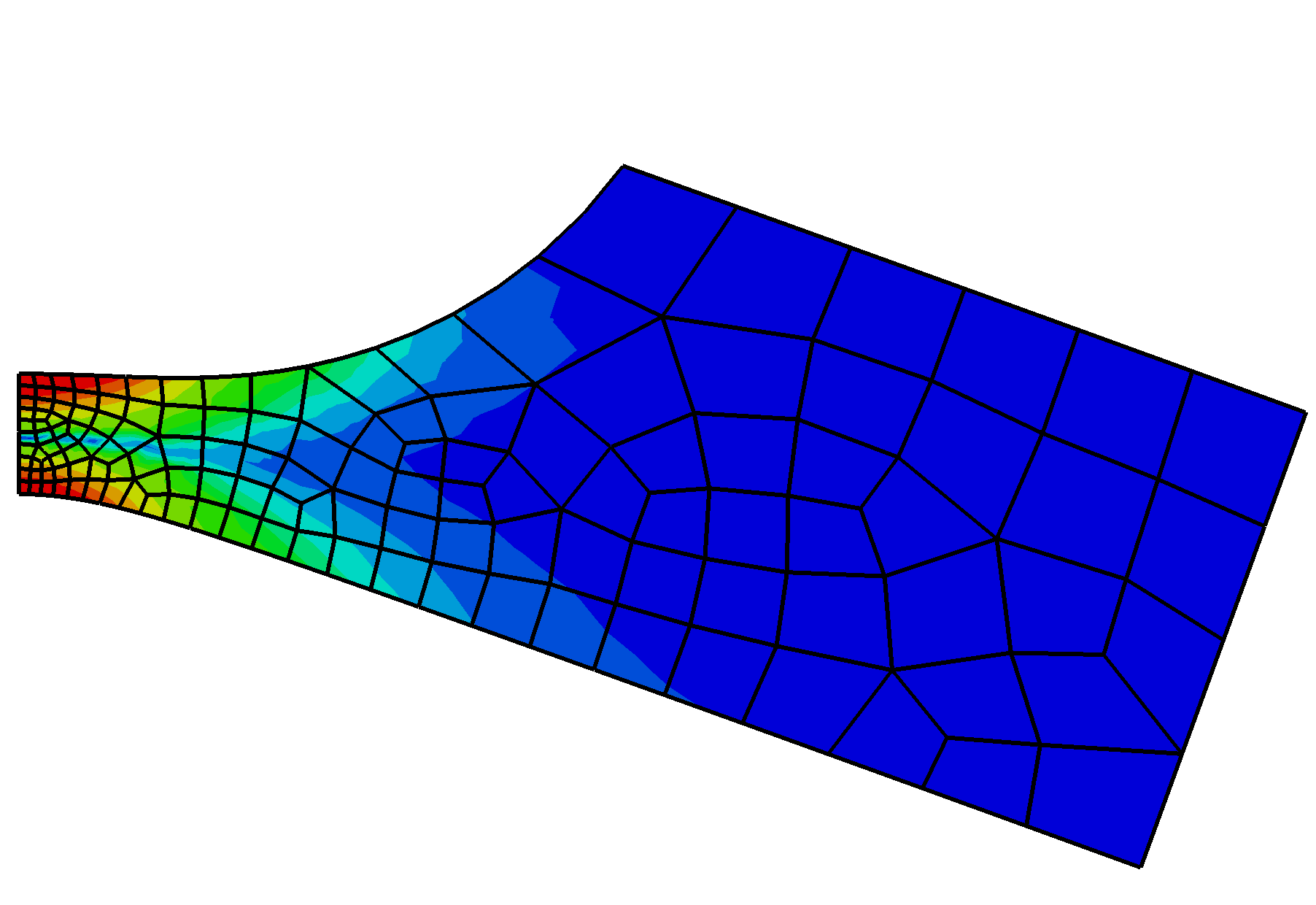
Stretching the Boundary: Shell Finite Elements for Pneumatic Soft ActuatorsLawrence Smith, Jacob Haimes, and Robert MacCurdy2022 IEEE 5th International Conference on Soft Robotics, RoboSoft 2022, 2022Many soft robotics researchers use numerical simulation; all of them wish their simulations would run faster. In this paper we highlight an attractive option for simulating pneumatic soft actuator designs: zero-thickness shell finite elements. These offer a favorable balance between predictive accuracy and computational cost relative to standard approaches. We find that shell finite elements offer a 7x reduction in analysis time while accurately predicting the behavior of a wide variety of soft actuators. The benefits conferred by shell finite element analysis are especially valuable in contexts where simulation speed is as important as absolute accuracy, such as automated design, optimization, and real-time control.
@article{Smith2022StretchingActuators, title = {{Stretching the Boundary: Shell Finite Elements for Pneumatic Soft Actuators}}, year = {2022}, journal = {2022 IEEE 5th International Conference on Soft Robotics, RoboSoft 2022}, author = {Smith, Lawrence and Haimes, Jacob and MacCurdy, Robert}, pages = {403--408}, publisher = {IEEE}, isbn = {9781665408288}, doi = {10.1109/RoboSoft54090.2022.9762108}, }
2021
-
 A Seamless Workflow for Design and Fabrication of Multimaterial Pneumatic Soft ActuatorsLawrence Smith, Travis Hainsworth, Zachary Jordan, and 2 more authors2021
A Seamless Workflow for Design and Fabrication of Multimaterial Pneumatic Soft ActuatorsLawrence Smith, Travis Hainsworth, Zachary Jordan, and 2 more authors2021Soft robotic actuators offer a range of attractive features relative to traditional rigid robots including inherently safer human-robot interaction and robustness to unexpected or extreme loading conditions. Soft robots are challenging to design and fabricate, and most actuators are designed by trial and error and fabricated using labor-intensive multi-step casting processes. We present an integrated collection of software tools that address several limitations in the existing design and fabrication workflow for pneumatic soft actuators. We use implicit geometry functions to specify geometry and material distribution, a GUI-based software tool for interactive exploration of computational network representations of these implicit functions, and an automated tool for generating rapid simulation results of candidate designs. We prioritize seamless connectivity between all stages of the design and fabrication process, and elimination of steps that require human intervention. The software tools presented here integrate with existing capabilities for multimaterial additive manufacturing, and are also forward-compatible with emerging automated design techniques. The workflow presented here is intended as a community resource, and aimed at lowering barriers for the discovery of novel soft actuators by experts and novice users. The data gathered from human-interaction with this tool will be used by future automation tools to enable fully-automated soft actuator design based on high-level specifications.
@article{Smith2021AActuators, title = {{A Seamless Workflow for Design and Fabrication of Multimaterial Pneumatic Soft Actuators}}, year = {2021}, author = {Smith, Lawrence and Hainsworth, Travis and Jordan, Zachary and Bell, Xavier and Maccurdy, Robert}, pages = {1--6}, publisher = {IEEE}, isbn = {9781665418737}, } -
 Rapid Fabrication of Low-Cost Thermal Bubble-DrivenBrandon Hayes, Lawrence Smith, Heiko Kabutz, and 2 more authors2021
Rapid Fabrication of Low-Cost Thermal Bubble-DrivenBrandon Hayes, Lawrence Smith, Heiko Kabutz, and 2 more authors2021Thermal bubble-driven micro-pumps are an upcoming actuation technology that can be directly integrated into micro/mesofluidic channels to displace fluid without any moving parts. These pumps consist of high power micro-resistors, which we term thermal micro-pump (TMP) resistors, that locally boil fluid at the resistor surface in microseconds creating a vapor bubble to perform mechanical work. Conventional fabrication approaches of thermal bubble-driven micro-pumps and associated microfluidics have utilized semiconductor micro-fabrication techniques requiring expensive tooling with long turn around times on the order of weeks to months. In this study, we present a low-cost approach to rapidly fabricate and test thermal bubble-driven micro-pumps with associated microfluidics utilizing commercial substrates (indium tin oxide, ITO, and fluorine doped tin oxide, FTO, coated glass) and tooling (laser cutter). The presented fabrication approach greatly reduces the turn around time from weeks/months for conventional micro-fabrication to a matter of hours/days allowing acceleration of thermal bubble-driven micro-pump research and development (R&D) learning cycles.
@article{Hayes2021RapidBubble-Driven, title = {{Rapid Fabrication of Low-Cost Thermal Bubble-Driven}}, year = {2021}, author = {Hayes, Brandon and Smith, Lawrence and Kabutz, Heiko and Jayaram, Kaushik and Maccurdy, Robert}, pages = {1--21}, keywords = {and maccurdy, b, bubble dynamics, citation, h, hayes, jayaram, k, kabutz, l, low-cost, microfluidics, phase change, r, rapid fabrication of low-cost, smith}, }
2020
-
 A Fabrication Free, 3D Printed, Multi-Material, Self-Sensing Soft ActuatorTravis Hainsworth, Lawrence Smith, Sebastian Alexander, and 1 more authorIEEE Robotics and Automation Letters, 2020
A Fabrication Free, 3D Printed, Multi-Material, Self-Sensing Soft ActuatorTravis Hainsworth, Lawrence Smith, Sebastian Alexander, and 1 more authorIEEE Robotics and Automation Letters, 2020Soft robotics offers a range of attractive features relative to traditional rigid robots, including inherently safer human-robot interactions, and continuous passive dynamics that enable morphological computation. Here we present an actuator with an integrated print-in-place strain sensor which is produced entirely via multi-material additive manufacturing and requires no post processing or manual fabrication steps. One natural application of this technology is the end effector of robotic arms; incorporating deformable actuators into a gripping mechanism allows for the safe integration of robotic assistance in human-occupied settings. While numerous soft robot actuators have been implemented without feedback, force sensing and proprioception are valuable signals to leverage in extending the capabilities of these systems. Prior approaches to integrating sensors into soft robot components have relied on manual processes, or specialized fabrication tools. Our work shows a novel method for automatically manufacturing soft pneumatically-driven actuators with embedded sensors through readily available 3D printing tools with no human fabrication required. Automatically manufacturing these sensor-actuator systems enables more complex, capable, and integrate-able designs, because the labor of assembly is eliminated; actuator-sensor designs that would be tedious or impossible to manufacture become tractable with our approach.
@article{Hainsworth2020AActuator, title = {{A Fabrication Free, 3D Printed, Multi-Material, Self-Sensing Soft Actuator}}, year = {2020}, journal = {IEEE Robotics and Automation Letters}, author = {Hainsworth, Travis and Smith, Lawrence and Alexander, Sebastian and MacCurdy, Robert}, number = {3}, pages = {4118--4125}, volume = {5}, publisher = {IEEE}, doi = {10.1109/LRA.2020.2986760}, issn = {23773766}, keywords = {Soft sensors and actuators, additive manufacturing, grippers and other end-effectors, hydraulic/pneumatic actuators, soft robot materials and design}, }